Overview¶
In this Notebook, you will write a shape-based gesture classifier (or sometimes called a template-based classifier)—that is, a classifier that measures the similarity between time-series signals. This is in contrast to a feature-based classifier, which extracts features from the signal (e.g., mean, variance, strongest frequency) to train a model for classification. We'll do that in a future notebook.
Importantly, for this assignment, you will be working with pre-segmented data—that is, we'll use the segmentation boundaries from the "ground truth" data collected with the GestureRecorder. This will enable us to focus purely on the classification aspects of this assignment rather than intermixing segmentation + classification.
GestureRecorder data collection¶
We wrote a gesture data collection system composed of two parts (source code):
- An Arduino program called LIS3DHGestureRecorder.ino that writes out accelerometer data in a CSV format on Serial: timestamp, x, y, z at ~90 Hz. The program also sends a button state to trigger data recording in the GestureRecorder program, described next.
- A Processing program called GestureRecorder.pde, which runs on your Windows, Mac, or Linux machine, reads the Serial data from the Arduino program, and steps you through the gesture data collection process, including: (1) prompting you to perform gestures; (2) saving those gestures to the filesystem (in a directory called
GestureLogs). You must download and install Processing for this program to work.
Here's a video demonstration of me using GestureRecorder:
from IPython.lib.display import YouTubeVideo
YouTubeVideo('z9OeVyGdbVY', width=800, height=500)
Using this notebook¶
The cells are written such that they should be executed in order.
Data from GestureRecorder¶
This Notebook reads gesture logs from the GestureLogs folder, which must exist in the same dir as this .ipynb. Inside of GestureLogs, you should have one or more sub-directories like JonGestures or FrankGestures, which were created by the GestureRecorder.pde.
We have included one GestureLog folder already called JonGestures. In addition, we have a sample of log files from previous classes in the folder ADXL335GestureLogs; however, these were recorded with the ADXL335 accelerometer rather than the LIS3DH accelerometer. So, normalized versions of the gesture signals should be similar but non-normalized versions will have different y-amplitudes.
The gesturerec package¶
We wrote the gesturerec package to handle parsing the sensor stream data and to help run basic classification experiments. You can and should look over the code in the gesturerec folder, particularly data.py and experiments.py. Feel free to edit this code!
It might look a bit complicated at first but you'll build up a stronger understanding as you look over this Notebook and start writing analysis and visualization code.
There are three primary data structure objects in gesturerec.data:
- At the top level, we have a
GestureSet, which contains all of the gesture data for a person. - Each
GestureSetobject contains adict()mapping gesture names to trials (recall that in the assignment, you had to collect 5 trials of 11 gestures) - Each
Trialobject contains the sensor data (SensorData) for that trial, which is the accelerometer data (x, y, z, and a computed magnitude)
Given that there can be multiple loaded gesture sets, we have a global object called map_gesture_sets that maps the gesture set name to the GestureSet object.
Your TODOs¶
In general, your coding TODOs are marked below with the word TODO. Search for the word "TODO" using your web browser's find functionality (ctrl-f or cmd-f).
- Record your own gesture set using GestureRecorder. Name your gesture log folder and put it in
GestureLogs - Then visualize and explore the data
- Think about, experiment, and write code for preprocessing the data.
- Think about, experiment, and write code for comparing two signals and returning a similarity score (lower is better)
- Write a k-folds cross-validation method
- Run experiments and iterate on your algorithms (take notes on what you've found)
- Write-up your results for your gesture set and for others in the course.
You should be able to get above 90% classification accuracies but aim for 100%, of course! :)
Misc¶
How To Navigate This Notebook¶
I strongly encourage you to install the toc2 extension, which will give you a navigable table of contents (based on markdown) on a side pane and drop-down menu.
Writing Docstrings¶
To help with commenting your functions, it's helpful to write Docstrings. More here.
Dynamic Time Warping Library¶
If you choose to explore Dynamic Time Warping (DTW), I recommend fastdtw. You can install this by typing the following in cell:
import sys
!{sys.executable} -m pip install fastdtwYou could also write your own DTW algorithm from scratch (e.g., link).
About this Notebook¶
This Notebook was designed and written by Professor Jon E. Froehlich at the University of Washington along with feedback from students. It is made available freely online as an open educational resource at the teaching website: https://makeabilitylab.github.io/physcomp/.
The website, Notebook code, and Arduino code are all open source using the MIT license.
Please file a GitHub Issue or Pull Request for changes/comments or email me directly.
Imports¶
# This cell includes the major classes used in our classification analyses
import matplotlib.pyplot as plt
import numpy as np
import scipy as sp
from scipy import signal
import random
import os
# We wrote this gesturerec package for the class
# It provides some useful data structures for the accelerometer signal
# and running experiments so you can focus on writing classification code,
# evaluating your solutions, and iterating
import gesturerec.utility as grutils
import gesturerec.data as grdata
import gesturerec.gesturestream as grstream
from gesturerec.data import SensorData
from gesturerec.data import GestureSet
from gesturerec.experiments import Experiments
from gesturerec.experiments import ClassificationResults
from gesturerec.experiments import TrialClassificationResult
Load the data¶
# Load the data
root_gesture_log_path = './GestureLogs'
print("Found the following gesture log sub-directories")
print(grutils.get_immediate_subdirectories(root_gesture_log_path))
gesture_log_paths = grutils.get_immediate_subdirectories(root_gesture_log_path)
map_gesture_sets = dict()
selected_gesture_set = None
for gesture_log_path in gesture_log_paths:
path_to_gesture_log = os.path.join(root_gesture_log_path, gesture_log_path)
print("Creating a GestureSet object for path '{}'".format(path_to_gesture_log))
gesture_set = GestureSet(path_to_gesture_log)
gesture_set.load()
map_gesture_sets[gesture_set.name] = gesture_set
if selected_gesture_set is None:
# Since we load multiple gesture sets and often want to just visualize and explore
# one set, in particular, we set a selected_gesture_set variable here
# Feel free to change this
#selected_gesture_set = get_random_gesture_set(map_gesture_sets)
selected_gesture_set = grdata.get_gesture_set_with_str(map_gesture_sets, "Jon")
if selected_gesture_set is None:
# if the selected gesture set is still None
selected_gesture_set = grdata.get_random_gesture_set(map_gesture_sets);
print("The selected gesture set:", selected_gesture_set)
The map_gesture_sets is a dict object and is our primary data structure: it maps gesture dir names to GestureSet objects. There's truly nothing special here. But we realize our data structures do require a learning ramp-up. Let's iterate through the GestureSets.
print(f"We have {len(map_gesture_sets)} gesture sets:")
for gesture_set_name, gesture_set in map_gesture_sets.items():
print(f" {gesture_set_name} with {len(gesture_set.get_all_trials())} trials")
# Feel free to change the selected_gesture_set. It's just a convenient variable
# to explore one gesture set at a time
print(f"The selected gesture set is: {selected_gesture_set.name}")
Preprocess the data¶
You'll want to write your own preprocessing algorithms in preprocess_signal. The preprocessed data is stored in SensorData's x_p, y_p, z_p, and mag_p while the raw data is x, y, z, and mag.
def preprocess_signal(s):
'''Preprocesses the signal'''
# TODO: write your preprocessing code here. We'll do something very simple for now,
# which is just a mean filter of window size 5. But you'll need to do more!
# For exampling, explore detrending and diff filtering algs (with different window sizes)
mean_filter_window_size = 5
processed_signal = np.convolve(s,
np.ones((mean_filter_window_size,))/mean_filter_window_size,
mode='valid')
return processed_signal
def preprocess_trial(trial):
'''Processess the given trial'''
trial.accel.x_p = preprocess_signal(trial.accel.x)
trial.accel.y_p = preprocess_signal(trial.accel.y)
trial.accel.z_p = preprocess_signal(trial.accel.z)
trial.accel.mag_p = preprocess_signal(trial.accel.mag)
for gesture_set in map_gesture_sets.values():
for gesture_name, trials in gesture_set.map_gestures_to_trials.items():
for trial in trials:
preprocess_trial(trial)
Explore the data¶
We have some example visualizations to help you explore the data (and the result of your preprocessing algorithms) but we expect that you'll want (and need) to write more. Exploring data is fun!
For this, we'll use the selected_gesture_set variable, which was set during load. You could change it to something else, however, and rerun these cells. For example:
selected_gesture_set = grdata.get_random_gesture_set(map_gesture_sets)or
selected_gesture_set = grdata.get_gesture_set_with_str(map_gesture_sets, "Jon")Plot a random gesture¶
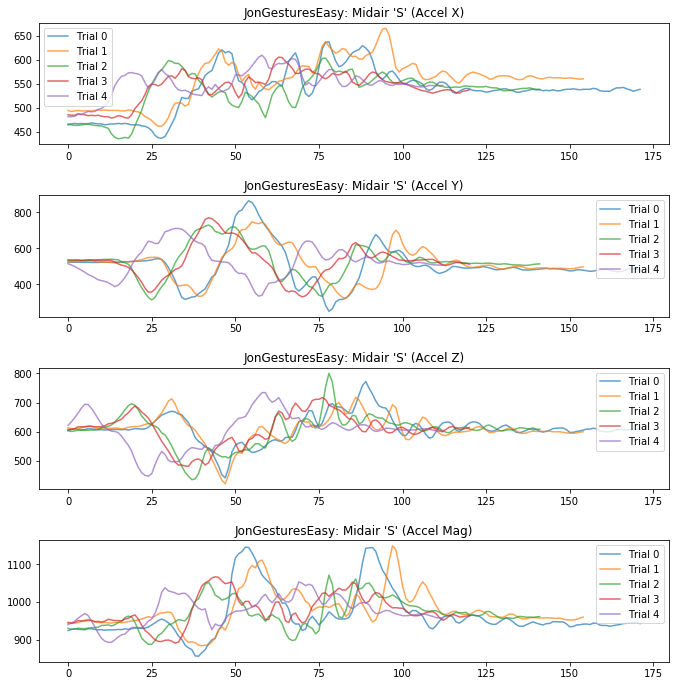
Let's start by plotting the x, y, z and mag for all the trials of a random gesture for the selected_gesture_set
# For example,
rand_gesture_name = selected_gesture_set.get_random_gesture_name()
# This is where we actually make the plot.
# subplots allows us to make a nice grid of plots. For example, if you want to
# make a 2,2 grid of plots, change the 1 below to 2,2
fig, axes = plt.subplots(4, figsize=(10, 10)) #figsize is width, height
fig.tight_layout(pad=3) # add vertical spacing
gesture_trials = selected_gesture_set.get_trials_for_gesture(rand_gesture_name)
trial_num = 0
for trial in gesture_trials:
axes[0].plot(trial.accel.x, alpha=0.7, label="Trial {}".format(trial_num))
axes[1].plot(trial.accel.y, alpha=0.7, label="Trial {}".format(trial_num))
axes[2].plot(trial.accel.z, alpha=0.7, label="Trial {}".format(trial_num))
axes[3].plot(trial.accel.mag, alpha=0.7, label="Trial {}".format(trial_num))
trial_num = trial_num + 1
# set the title and show the legend
axes[0].set_title(selected_gesture_set.name + ": " + rand_gesture_name + " (Accel X)")
axes[0].legend();
axes[1].set_title(selected_gesture_set.name + ": " + rand_gesture_name + " (Accel Y)")
axes[1].legend();
axes[2].set_title(selected_gesture_set.name + ": " + rand_gesture_name + " (Accel Z)")
axes[2].legend();
axes[3].set_title(selected_gesture_set.name + ": " + rand_gesture_name + " (Accel Mag)")
axes[3].legend();
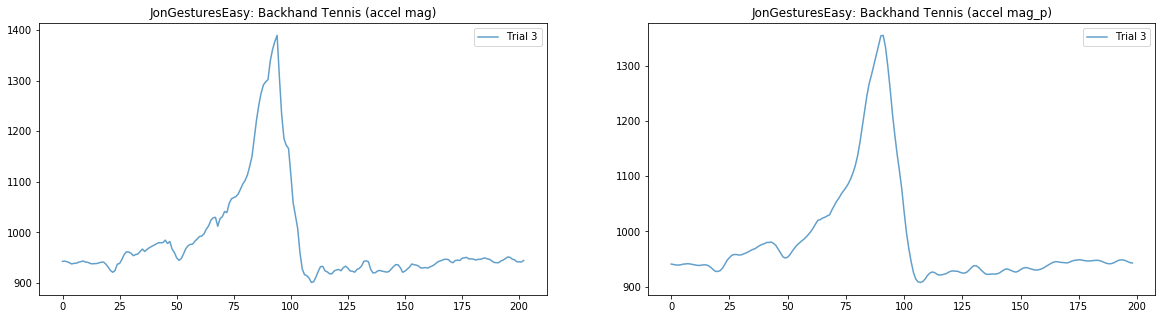
Plot raw and preprocessed signal¶
# Now let's plot both the raw and processed signal of a random gesture
# pulled from a random trial. This helps us explore how our preprocessing
# is working
rand_gesture_name = selected_gesture_set.get_random_gesture_name()
# We'll make a 1x2 grid of plots, so pass 1,2 to subplots
fig, axes = plt.subplots(1, 2, figsize=(20, 5)) #figsize is width, height
rand_trial = selected_gesture_set.get_random_trial_for_gesture(rand_gesture_name)
axes[0].plot(rand_trial.accel.mag, alpha=0.7, label="Trial {}".format(rand_trial.trial_num))
axes[0].set_title(selected_gesture_set.name + ": " + rand_gesture_name + " (accel mag)")
axes[0].legend()
axes[1].plot(rand_trial.accel.mag_p, alpha=0.7, label="Trial {}".format(rand_trial.trial_num))
axes[1].set_title(selected_gesture_set.name + ": " + rand_gesture_name + " (accel mag_p)")
axes[1].legend(); # include semi-colon to hide return output from legend(), <matplotlib.legend.Legend at 0x263de45dd30>
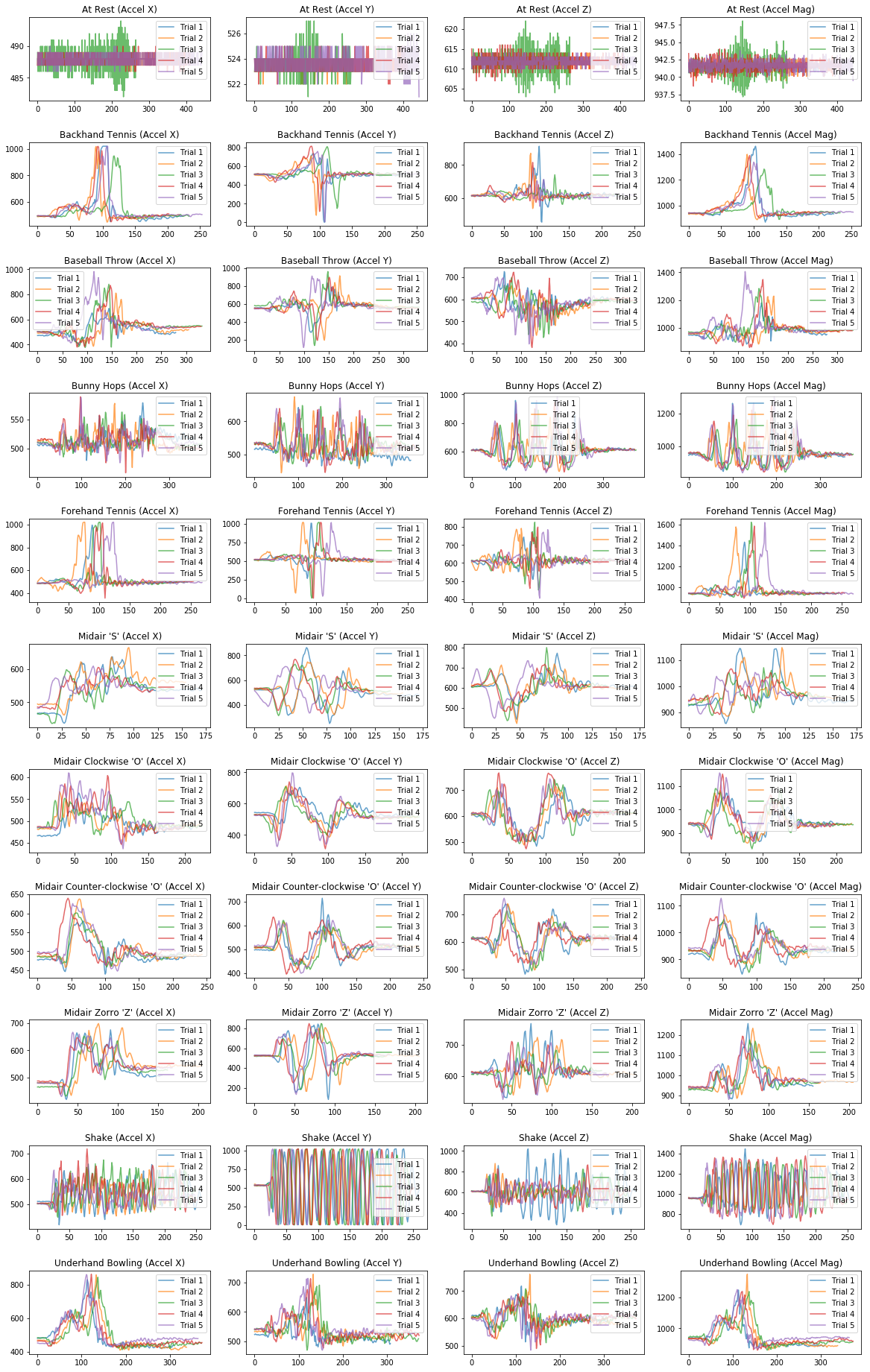
Plot giant grid of signals¶
Now let's go a bit crazy and plot all of the signals in a giant grid. What patterns do you observe? Do the signals look different? Do you think you could write a classifier to differentiate them?
# We are going to make a grid of line graphs with a row for each gesture, so len(mapGestureToTrials) rows
# and a column for each signal type, so 4 columns (one for x, y, z, and mag)
fig, axes = plt.subplots(len(selected_gesture_set.map_gestures_to_trials), 4,
figsize=(20, 3 * len(selected_gesture_set.map_gestures_to_trials)))
fig.subplots_adjust(hspace=0.5)
index = 0
for gesture_name in selected_gesture_set.get_gesture_names_sorted():
gesture_trials = selected_gesture_set.get_trials_for_gesture(gesture_name)
trial_num = 1
for trial in gesture_trials:
axes[index][0].plot(trial.accel.x, alpha=0.7, label="Trial {}".format(trial_num))
axes[index][1].plot(trial.accel.y, alpha=0.7, label="Trial {}".format(trial_num))
axes[index][2].plot(trial.accel.z, alpha=0.7, label="Trial {}".format(trial_num))
axes[index][3].plot(trial.accel.mag, alpha=0.7, label="Trial {}".format(trial_num))
trial_num = trial_num + 1
axes[index][0].set_title(gesture_name + " (Accel X)")
axes[index][0].legend()
axes[index][1].set_title(gesture_name + " (Accel Y)")
axes[index][1].legend()
axes[index][2].set_title(gesture_name + " (Accel Z)")
axes[index][2].legend()
axes[index][3].set_title(gesture_name + " (Accel Mag)")
axes[index][3].legend()
index = index + 1
Now let's plot all of the accel signals, both raw and processed.
# We are going to make a grid of line graphs with:
# two rows for each gesture (one raw, one processed), so len(mapGestureToTrials) * 2 rows
# and a column for each signal type, so 4 columns (one for x, y, z, and mag)
fig, axes = plt.subplots(len(selected_gesture_set.map_gestures_to_trials) * 2, 4,
figsize=(20, 5 * 2 * len(selected_gesture_set.map_gestures_to_trials)))
fig.subplots_adjust(hspace=0.5)
index = 0
for gesture_name in selected_gesture_set.get_gesture_names_sorted():
gesture_trials = selected_gesture_set.get_trials_for_gesture(gesture_name)
trial_num = 1
for trial in gesture_trials:
axes[index][0].plot(trial.accel.x, alpha=0.7, label="Trial {}".format(trial_num))
axes[index][1].plot(trial.accel.y, alpha=0.7, label="Trial {}".format(trial_num))
axes[index][2].plot(trial.accel.z, alpha=0.7, label="Trial {}".format(trial_num))
axes[index][3].plot(trial.accel.mag, alpha=0.7, label="Trial {}".format(trial_num))
axes[index + 1][0].plot(trial.accel.x_p, alpha=0.7, label="Trial {}".format(trial_num))
axes[index + 1][1].plot(trial.accel.y_p, alpha=0.7, label="Trial {}".format(trial_num))
axes[index + 1][2].plot(trial.accel.z_p, alpha=0.7, label="Trial {}".format(trial_num))
axes[index + 1][3].plot(trial.accel.mag_p, alpha=0.7, label="Trial {}".format(trial_num))
trial_num = trial_num + 1
axes[index][0].set_title(gesture_name + " (accel x)")
axes[index][1].set_title(gesture_name + " (accel y)")
axes[index][2].set_title(gesture_name + " (accel z)")
axes[index][3].set_title(gesture_name + " (accel mag)")
axes[index][0].legend()
axes[index][1].legend()
axes[index][2].legend()
axes[index][3].legend()
index = index + 1
axes[index][0].set_title(gesture_name + " (accel x_p)")
axes[index][1].set_title(gesture_name + " (accel y_p)")
axes[index][2].set_title(gesture_name + " (accel z_p)")
axes[index][3].set_title(gesture_name + " (accel mag_p)")
axes[index][0].legend()
axes[index][1].legend()
axes[index][2].legend()
axes[index][3].legend()
index = index + 1

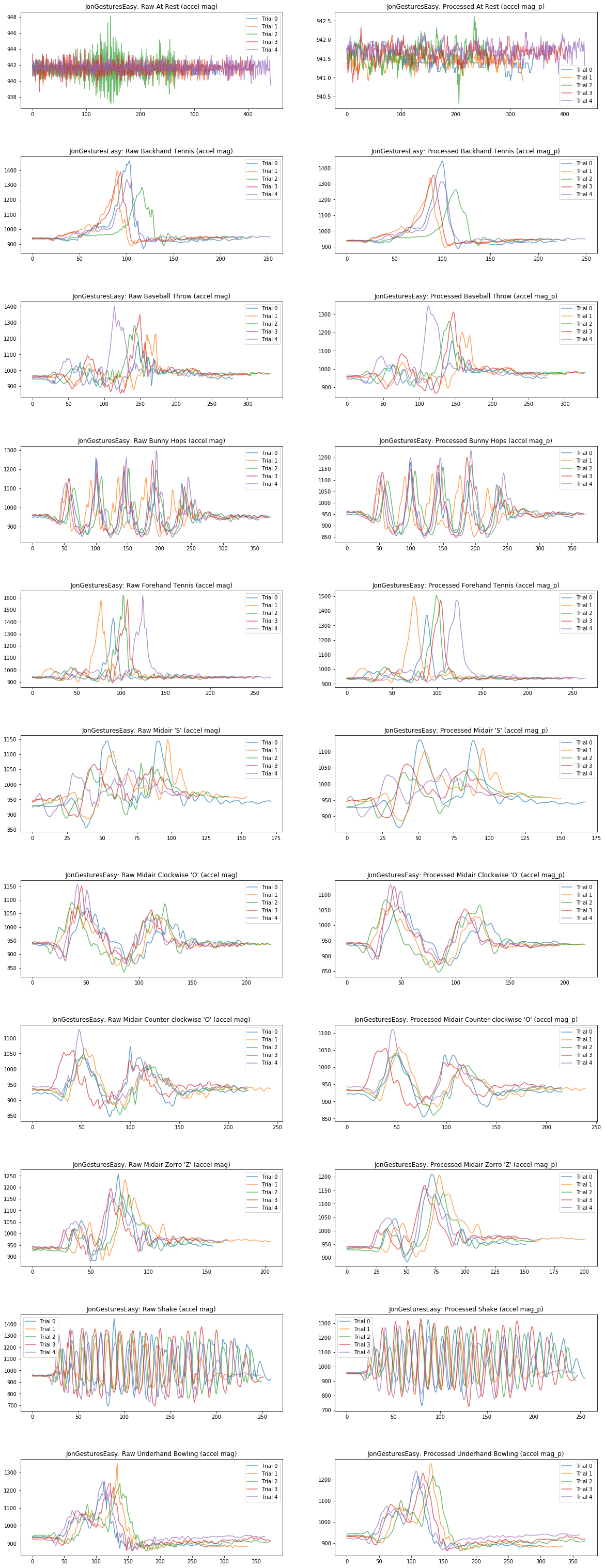
Plot raw vs. preprocessed magnitude¶
Or maybe we just want to focus on the magnitude of the signal. Is there enough visual salience in here that you think this signal alone is discriminable for classifying gestures?
map_gestures_to_trials = selected_gesture_set.map_gestures_to_trials
fig, axes = plt.subplots(len(map_gestures_to_trials), 2, figsize=(20, 5 * len(map_gestures_to_trials)))
fig.subplots_adjust(hspace=0.5)
index = 0
for gesture_name in selected_gesture_set.get_gesture_names_sorted():
gesture_trials = map_gestures_to_trials[gesture_name]
trial_num = 0
for trial in gesture_trials:
axes[index][0].plot(trial.accel.mag, alpha=0.7, label="Trial {}".format(trial_num))
axes[index][1].plot(trial.accel.mag_p, alpha=0.7, label="Trial {}".format(trial_num))
trial_num = trial_num + 1
axes[index][0].set_title(selected_gesture_set.name + ": Raw " + gesture_name + " (accel mag)")
axes[index][0].legend()
axes[index][1].set_title(selected_gesture_set.name + ": Processed " + gesture_name + " (accel mag_p)")
axes[index][1].legend()
index = index + 1
Classification experiments¶
Start analyzing and comparing these gesture signals.Think about:
- What patterns do you see in the data?
- What kind of filtering might be useful?
- How can you best align the signals for comparison? (e.g., hint: scroll down to see the Euclidean distance comparisons)
- What kind of signal transforms might be useful? (e.g., ffts, derivative waveforms)
- What is the simplest way we can compare two signals?
K-Fold Cross Validation Methods¶
# The k-fold cross validation methods
# TODO: write your own kfolds method here
def generate_kfolds(num_folds, gesture_set, seed=None):
'''
Returns a list of folds where each list item is a dict() with key=gesture name and value=selected trial
for that fold. To generate the same fold structure, pass in the same seed value (this is useful for
setting up experiments)
num_folds : the number of folds
gesture_set : the gesture set for splitting into k-folds
seed : an integer seed value (pass in the same seed value to get the same split across multiple executions)
'''
# Quick check to make sure that there are numFolds of gesture trials for each gesture
for gesture_name, trials in gesture_set.map_gestures_to_trials.items():
if num_folds != len(trials):
raise ValueError("For the purposes of this assignment, the number of folds={} must equal the number of trials for each gesture. Gesture '{}' has {} trials"
.format(num_folds, gesture_name, len(trials)))
# TODO
list_folds = []
check_folds(list_folds) # for debugging. You can comment this out
return list_folds # each index of the list represents a fold, which contains a map of gesture names to trials
from sklearn.model_selection import StratifiedKFold
def generate_kfolds_scikit(num_folds, gesture_set, seed=None):
'''
Here's an example of generating kfolds using scikit but returning our data structure
Parameters:
num_folds: the number of folds
gesture_set: the gesture set for splitting into k-folds
seed: an integer seed value (pass in the same seed value to get the same split across multiple executions)
Returns:
Returns a list of folds where each list item is a dict() with key=gesture name and value=selected trial
for that fold. To generate the same fold structure, pass in the same seed value (this is useful for
setting up experiments). Note that even with the same seed value, this method and generate_kfolds will
generate different results.
'''
trials = []
trial_nums = []
gesture_names = []
for gesture_name, gesture_trials in gesture_set.map_gestures_to_trials.items():
for trial in gesture_trials:
trials.append(trial)
trial_nums.append(trial.trial_num)
gesture_names.append(gesture_name)
skf = StratifiedKFold(n_splits=num_folds, shuffle=True, random_state=seed)
# Iterate through the splits and setup our data structure
fold_cnt = 0
list_folds = list()
for train_idx, test_idx in skf.split(trials, gesture_names):
cur_fold_map_gesture_to_trial = dict()
for i in test_idx:
cur_fold_map_gesture_to_trial[gesture_names[i]] = trials[i]
list_folds.append(cur_fold_map_gesture_to_trial)
fold_cnt += 1
return list_folds
def print_folds(list_folds):
'''
Prints out the folds (useful for debugging)
'''
# print out folds (for debugging)
fold_index = 0
if fold_index == 0:
for fold in list_folds:
print("Fold: ", fold_index)
for gesture_name, trial in fold.items():
print("\t{} Trial: {}".format(gesture_name, trial.trial_num))
fold_index = fold_index + 1
def check_folds(folds):
'''
Checks to see that the folds are appropriately setup (useful for debugging)
Throw an exception if there appears to be a problem
'''
for test_fold_idx in range(0, len(folds)):
# check to make sure test data is not in training data
for test_gesture, test_trial in folds[test_fold_idx].items():
# search for this test_gesture and trial_num in all other folds
# it shouldn't be there!
for train_fold_idx in range(0, len(folds)):
if test_fold_idx != train_fold_idx:
for train_gesture, train_trial in folds[train_fold_idx].items():
if test_gesture == train_gesture and test_trial.trial_num == train_trial.trial_num:
raise Exception("Uh oh, gesture '{}' trial '{}' was found in both test fold '{}' and\
training fold '{}.' Training folds should not include test data".format(
test_gesture, test_trial.trial_num, test_fold_idx, train_fold_idx))
The matching algorithms¶
We have a top-level function called run_match_algorithm, which takes in a list of folds (setup for k-fold cross validation) and a "pointer" to a find_closest_match_alg algorithm, which may take one or more arguments (from **kwargs)
from scipy.spatial import distance
import time
def run_matching_algorithm(list_folds, find_closest_match_alg, **kwargs):
'''
Our primary matching algorithm function that takes in a fold, a matching algorithm, and optional
arguments (**kwargs) for that matching alg. Returns a ClassificationResults object
list_folds : the folds generated by generate_kfolds
find_closest_match_alg : "pointer" to the closest match function you want to test
kwargs : optional arguments to pass to find_closest_match_alg
'''
verbose = False
if 'verbose' in kwargs:
verbose = kwargs['verbose']
fold_index = 0
map_gesture_name_to_list_results = dict()
for fold in list_folds:
if verbose:
print("\n**FOLD: {}**".format(fold_index))
correctness_cnt_for_fold = 0
elapsed_time_for_fold = 0
for test_gesture_name, test_trial in fold.items():
template_folds = list_folds[0:fold_index] + list_folds[fold_index + 1:len(list_folds)]
template_trials = list()
for fold in template_folds:
for template_gesture_name, template_trial in fold.items():
template_trials.append(template_trial)
start_time = time.time()
trial_classification_result = find_closest_match_alg(test_trial, template_trials, **kwargs)
elapsed_time_in_secs = time.time() - start_time
trial_classification_result.fold_idx = fold_index
trial_classification_result.elapsed_time = elapsed_time_in_secs
elapsed_time_for_fold += elapsed_time_in_secs
if trial_classification_result.is_correct:
correctness_cnt_for_fold += 1
if verbose:
print(trial_classification_result)
# track overall results across comparisons
if test_gesture_name not in map_gesture_name_to_list_results:
map_gesture_name_to_list_results[test_gesture_name] = list()
map_gesture_name_to_list_results[test_gesture_name].append(trial_classification_result)
# print out overall fold accuracy
fold_accuracy = (correctness_cnt_for_fold / len(fold)) * 100;
if verbose:
print("COMPLETED FOLD: {} IN {:0.3f} SECS WITH ACCURACY {}/{} ({:0.1f}%)".
format(fold_index, elapsed_time_for_fold, correctness_cnt_for_fold, len(fold), fold_accuracy))
fold_index = fold_index + 1
classification_result = ClassificationResults(find_closest_match_alg.__name__,
map_gesture_name_to_list_results, **kwargs)
return classification_result
Write your matching algorithms here¶
We've created two simple matching functions to help you understand the format for our experimental testbed.
def find_closest_match_euclid_raw_x(test_trial, template_trials, **kwargs):
'''
Example closest match function using euclidean distance and the accelerometer X value
Note: I'm not saying this is necessarily a *good performing* example but it should run :)
For a more generic version of this method, see find_closest_match_euclid_signal
Example:
run_matching_algorithm(list_folds, find_closest_match_euclid_raw_x, verbose=True)
Parameters:
test_trial: the test trial
template_trials: the template trials
kwargs: optional arguments for match function
Returns a TrialClassificationResult
'''
# Tuple list of trial to score
n_best_list_tuple = list()
for template_trial in template_trials:
# Euclidean distance requires that both arrays are the same length, so we must pad the shorter one
test_trial_signal = test_trial.accel.x
template_trial_signal = template_trial.accel.x
if len(test_trial_signal) > len(template_trial_signal):
array_length_diff = len(test_trial_signal) - len(template_trial_signal)
template_trial_signal = np.pad(template_trial_signal, (0, array_length_diff), 'mean')
elif len(template_trial_signal) > len(test_trial_signal):
array_length_diff = len(template_trial_signal) - len(test_trial_signal)
test_trial_signal = np.pad(test_trial_signal, (0, array_length_diff), 'mean')
# Calculate the Euclidean distance between the two signals
euclid_distance = distance.euclidean(test_trial_signal, template_trial_signal)
n_best_list_tuple.append((template_trial, euclid_distance))
trial_classification_result = TrialClassificationResult(test_trial, n_best_list_tuple)
return trial_classification_result
def find_closest_match_euclid_signal(test_trial, template_trials, **kwargs):
'''
Example closest match function using euclidean distance and a specified
signal from SensorData (e.g., x, y, z, mag, x_p, y_p, z_p, mag_p)
This is exactly the same as find_closest_match_euclid_raw_x but more flexible
in that you can pass a member variable of SensorData in signal_var_name
Example:
run_matching_algorithm(list_folds, find_closest_match_euclid_signal, verbose=True, signal_var_name='x')
run_matching_algorithm(list_folds, find_closest_match_euclid_signal, verbose=True, signal_var_name='y')
Parameters:
test_trial: the test trial
template_trials: the template trials
kwargs: one required argument for match function
signal_var_name must be specified and is the member variable of SensorData used for
the test (e.g., x, y, z, mag, x_p, y_p, z_p, mag_p )
Returns a TrialClassificationResult
'''
if 'signal_var_name' not in kwargs:
raise Exception("The 'signal_var_name' kwarg must be specified. For example, \"signal_var_name='x'\"")
signal_var_name = kwargs['signal_var_name']
# Tuple list of trial to score
n_best_list_tuple = list()
for template_trial in template_trials:
# Euclidean distance requires that both arrays are the same length, so we must pad the shorter one
test_trial_signal = getattr(test_trial.accel, signal_var_name)
template_trial_signal = getattr(template_trial.accel, signal_var_name)
if len(test_trial_signal) > len(template_trial_signal):
array_length_diff = len(test_trial_signal) - len(template_trial_signal)
template_trial_signal = np.pad(template_trial_signal, (0, array_length_diff), 'mean')
elif len(template_trial_signal) > len(test_trial_signal):
array_length_diff = len(template_trial_signal) - len(test_trial_signal)
test_trial_signal = np.pad(test_trial_signal, (0, array_length_diff), 'mean')
# Calculate the Euclidean distance between the two signals
euclid_distance = distance.euclidean(test_trial_signal, template_trial_signal)
n_best_list_tuple.append((template_trial, euclid_distance))
trial_classification_result = TrialClassificationResult(test_trial, n_best_list_tuple)
return trial_classification_result
# TODO: Write your similarity functions here. Write as many as you can brainstorm! :)
# For example, how about writing a DTW-based algorithm here.
def find_closest_match_dtw(test_trial, template_trials, **kwargs):
print("Implement this")
def find_closest_match_your_alg_here(test_trial, template_trials, **kwargs):
print("Implement this too")
# Remember, your 'scoring' function is whatever *you* want--it could combine distance calculations across
# x, y, z, and mag--or just one of those signals. And it can use whatever similarity measure you decide upon!
# What about finding the best alignment between signals before computing a similarity measure?
Running Experiments¶
# Run experiments
# Note: remember, we want you to write your own generate_kfolds function
# You can use generate_kfolds_scikit instead if you'd like to test other parts of your code
# but you must eventually write your own kfold split code for the assignment
gesture_set = grdata.get_gesture_set_with_str(map_gesture_sets, "Easy")
# TODO: switch this to generate_kfolds once you've written that method.
# For now, you can use our method `generate_kfolds_scikit`
list_folds = generate_kfolds_scikit(5, gesture_set, seed=5)
# print out folds (for debugging)
print("DEBUG: PRINTING OUT FOLDS")
print_folds(list_folds)
# track multiple experiments
experiments = Experiments()
# run initial experiment
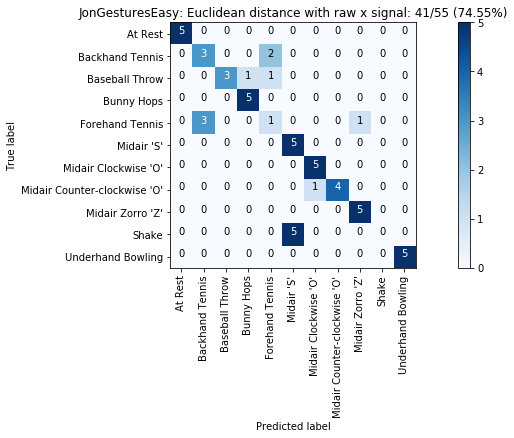
results_x = run_matching_algorithm(list_folds, find_closest_match_euclid_raw_x, verbose=True)
results_x.title = "{}: Euclidean distance with raw x signal".format(gesture_set.name)
results_x.print_result()
experiments.add(results_x)
# run second experiment
# just giving you a sense of how you can run and track multiple experiments
results_y = run_matching_algorithm(list_folds, find_closest_match_euclid_signal, verbose=True, signal_var_name='y')
results_y.title = "{}: Euclidean distance with raw y signal".format(gesture_set.name)
experiments.add(results_y)
# run third experiment
results_y = run_matching_algorithm(list_folds, find_closest_match_euclid_signal, verbose=True, signal_var_name='z')
results_y.title = "{}: Euclidean distance with raw z signal".format(gesture_set.name)
experiments.add(results_y)
results_mag = run_matching_algorithm(list_folds, find_closest_match_euclid_signal, verbose=True, signal_var_name='mag')
results_mag.title = "{}: Euclidean distance with raw mag signal".format(gesture_set.name)
experiments.add(results_mag)
Visualizing Experiment Results¶
We've written a number of functions to help visualize experimental results. You'll likely want to add more, for example:
- Visualize incorrect matches. What happened? What could you do to improve your algorithm so these incorrect matches don't occur?
import itertools
from sklearn.metrics import confusion_matrix
from matplotlib.lines import Line2D
def plot_bar_graph_average_scores_by_gesture(classification_results):
'''
Plots the average scores for correct and incorrect matches
A good matching algorithm should have much lower scores for correct
matches than incorrect matches (if this is not the case, you'll want to work
on improving your matching algorithm)
'''
correct_score_means = []
incorrect_score_means = []
gesture_names = classification_results.get_gesture_names()
for gesture_name in gesture_names:
scores_correct_matches = np.array(classification_results.get_correct_match_scores_for_gesture(gesture_name))
scores_incorrect_matches = np.array(classification_results.get_incorrect_match_scores_for_gesture(gesture_name))
if len(scores_correct_matches) > 0:
correct_score_means.append(np.mean(scores_correct_matches))
else:
correct_score_means.append(0)
if len(scores_incorrect_matches) > 0:
incorrect_score_means.append(np.mean(scores_incorrect_matches))
else:
incorrect_score_means.append(0)
# create plot
fig, ax = plt.subplots(figsize=(12, 5))
index = np.arange(len(gesture_names))
bar_width = 0.35
opacity = 0.8
bars_correct = plt.bar(index, correct_score_means, bar_width, alpha=opacity, color='b', label='Correct')
bars_incorrect = plt.bar(index + bar_width, incorrect_score_means, bar_width, alpha=opacity, color='g', label='Incorrect')
plt.xlabel('Gesture')
plt.ylabel('Average Scores')
plt.title('Average Scores By Gesture and Correctness\n' + classification_results.get_title())
plt.xticks(index - bar_width, gesture_names, rotation=45)
plt.legend()
plt.tight_layout()
plt.show()
def plot_bar_graph_average_nbestlist_location_by_gesture(classification_results):
'''
Plots the average n-best list location for each gesture
'''
avg_nbestlist_location = []
gesture_names = classification_results.get_gesture_names()
for gesture_name in gesture_names:
correct_match_indices_in_nbestlist = np.array(classification_results.get_correct_match_indices_in_nbestlist_for_gesture(gesture_name))
avg_nbestlist_location.append(np.mean(correct_match_indices_in_nbestlist))
# create plot
fig, ax = plt.subplots(figsize=(12, 5))
index = np.arange(len(gesture_names))
# bar_width = 0.35
opacity = 0.8
bars_correct = plt.bar(index, avg_nbestlist_location, alpha=opacity, color='b', label='Avg NBest List Location')
plt.xlabel('Gesture')
plt.ylabel('Average NBest List Location')
plt.title('Average NBest List Location By Gesture\n' + classification_results.get_title())
plt.xticks(index, gesture_names, rotation=45)
plt.legend()
plt.tight_layout()
plt.show()
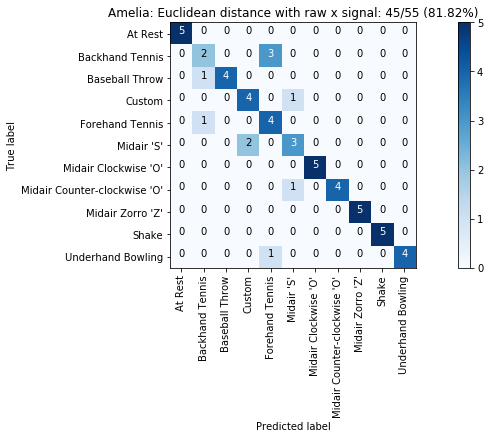
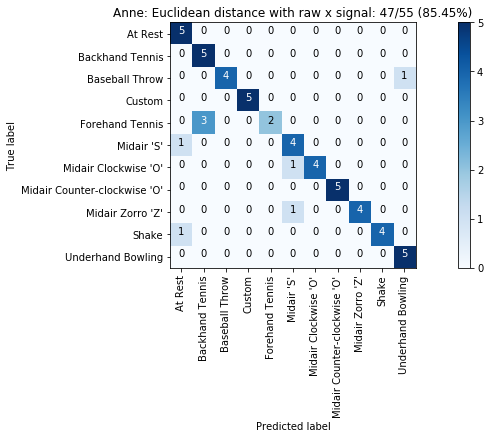
def plot_classification_result_as_confusion_matrix(classification_result, normalize=False, cmap=plt.cm.Blues):
"""
This function prints and plots the confusion matrix.
Normalization can be applied by setting `normalize=True`.
Code based on:
- http://scikit-learn.org/stable/auto_examples/model_selection/plot_confusion_matrix.html#sphx-glr-auto-examples-model-selection-plot-confusion-matrix-py
See also
- https://stackoverflow.com/a/35572520
- Plotting with matshow: https://matplotlib.org/gallery/images_contours_and_fields/matshow.html#sphx-glr-gallery-images-contours-and-fields-matshow-py
"""
cm = classification_result.get_confusion_matrix()
classes = classification_result.get_gesture_names()
plot_confusion_matrix(cm, classes, classification_result.get_title(), normalize, cmap)
def plot_confusion_matrix(cm, classes, title, normalize=False, cmap=plt.cm.Blues):
if normalize:
cm = cm.astype('float') / cm.sum(axis=1)[:, np.newaxis]
# print("Normalized confusion matrix")
# print(cm)
plt.figure(figsize=(12, 6))
plt.imshow(cm, interpolation='nearest', cmap=cmap) #imshow displays data on a 2D raster
plt.title(title)
plt.colorbar()
tick_marks = np.arange(len(classes))
plt.xticks(tick_marks, classes, rotation=90)
plt.yticks(tick_marks, classes)
fmt = '.2f' if normalize else 'd'
thresh = cm.max() / 2.
for i, j in itertools.product(range(cm.shape[0]), range(cm.shape[1])):
plt.text(j, i, format(cm[i, j], fmt),
horizontalalignment="center",
color="white" if cm[i, j] > thresh else "black")
plt.tight_layout()
plt.ylabel('True label')
plt.xlabel('Predicted label')
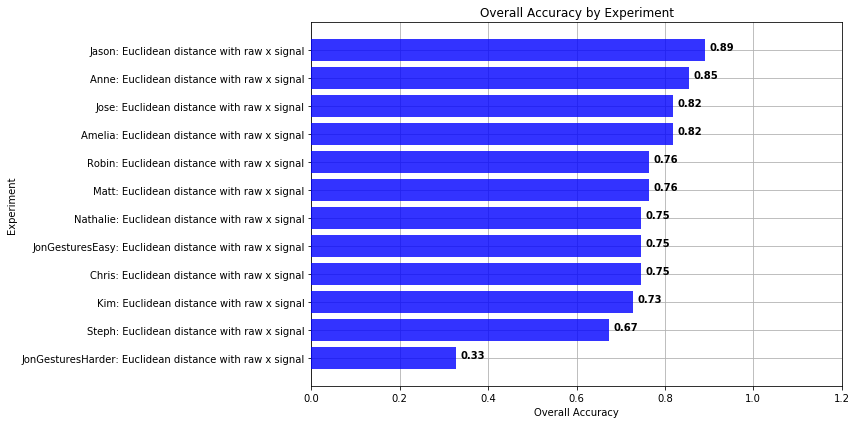
def plot_bar_graph_overall_performance(experiments):
'''
Plots a bar graph of overall performance
experiments : an Experiments object
'''
list_experiments = experiments.get_experiments_sorted_by_accuracy();
n_groups = len(list_experiments)
experiment_names = []
experiment_accuracies = []
for experiment in list_experiments:
experiment_names.append(experiment.title)
experiment_accuracies.append(experiment.get_accuracy())
# create plot
fig_height = max(n_groups * 0.5, 5)
fig, ax = plt.subplots(figsize=(12, fig_height))
index = np.arange(len(experiment_names))
# bar_width = 0.35
opacity = 0.8
plt.grid(zorder=0)
bars = plt.barh(index, experiment_accuracies, alpha=opacity, color='b', zorder=3)
for i, v in enumerate(experiment_accuracies):
ax.text(v + 0.01, i, "{:0.2f}".format(v), color='black', fontweight='bold')
plt.ylabel('Experiment')
plt.xlabel('Overall Accuracy')
plt.xlim(0, 1.2)
plt.title('Overall Accuracy by Experiment')
plt.yticks(index, experiment_names)
plt.tight_layout()
plt.show()
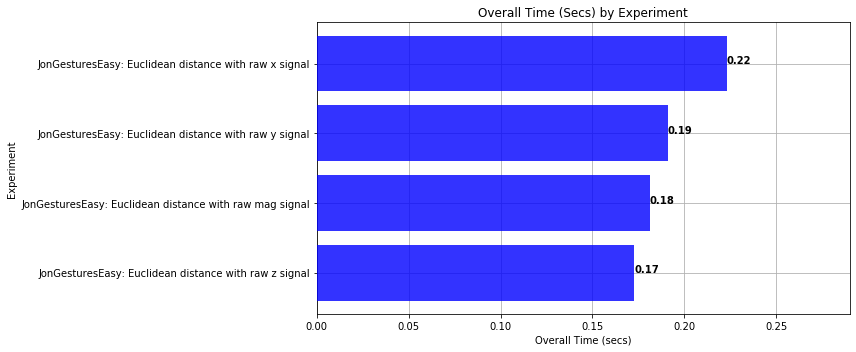
def plot_bar_graph_overall_time(experiments):
'''
Plots a bar graph of overall computation time per experiment
experiments : an Experiments object
'''
list_experiments = experiments.get_experiments_sorted_by_computation_time();
n_groups = len(list_experiments)
experiment_names = []
experiment_times = []
for experiment in list_experiments:
experiment_names.append(experiment.title)
experiment_times.append(experiment.total_time)
# create plot
fig_height = max(n_groups * 0.5, 5)
fig, ax = plt.subplots(figsize=(12, fig_height))
index = np.arange(len(experiment_names))
# bar_width = 0.35
opacity = 0.8
plt.grid(zorder=0)
bars = plt.barh(index, experiment_times, alpha=opacity, color='b', zorder=3)
for i, v in enumerate(experiment_times):
ax.text(v, i, "{:0.2f}".format(v), color='black', fontweight='bold')
plt.ylabel('Experiment')
plt.xlabel('Overall Time (secs)')
plt.xlim(0, list_experiments[-1].total_time * 1.3)
plt.title('Overall Time (Secs) by Experiment')
plt.yticks(index, experiment_names)
plt.tight_layout()
plt.show()
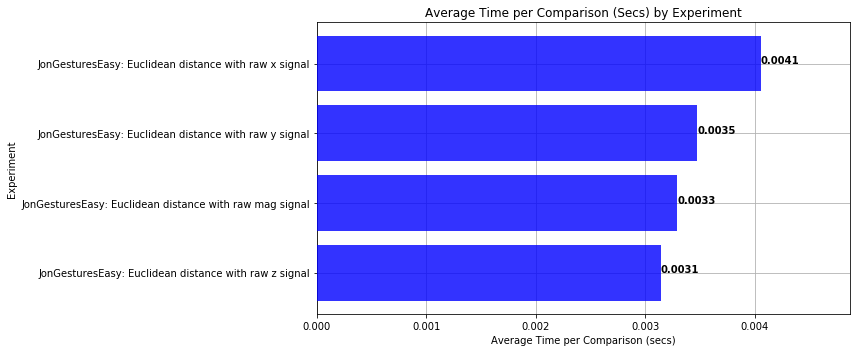
def plot_bar_graph_avg_time_per_comparison(experiments):
'''
Plots a bar graph of average computation time per comparison for each experiment
experiments : an Experiments object
'''
list_experiments = experiments.get_experiments_sorted_by_avg_time_per_comparison();
n_groups = len(list_experiments)
experiment_names = []
experiment_times = []
for experiment in list_experiments:
experiment_names.append(experiment.title)
experiment_times.append(experiment.get_avg_time_per_comparison())
# create plot
fig_height = max(n_groups * 0.5, 5)
fig, ax = plt.subplots(figsize=(12, fig_height))
index = np.arange(len(experiment_names))
# bar_width = 0.35
opacity = 0.8
plt.grid(zorder=0)
bars = plt.barh(index, experiment_times, alpha=opacity, color='b', zorder=3)
for i, v in enumerate(experiment_times):
ax.text(v, i, "{:0.4f}".format(v), color='black', fontweight='bold')
plt.ylabel('Experiment')
plt.xlabel('Average Time per Comparison (secs)')
plt.xlim(0, list_experiments[-1].get_avg_time_per_comparison() * 1.2)
plt.title('Average Time per Comparison (Secs) by Experiment')
plt.yticks(index, experiment_names)
plt.tight_layout()
plt.show()
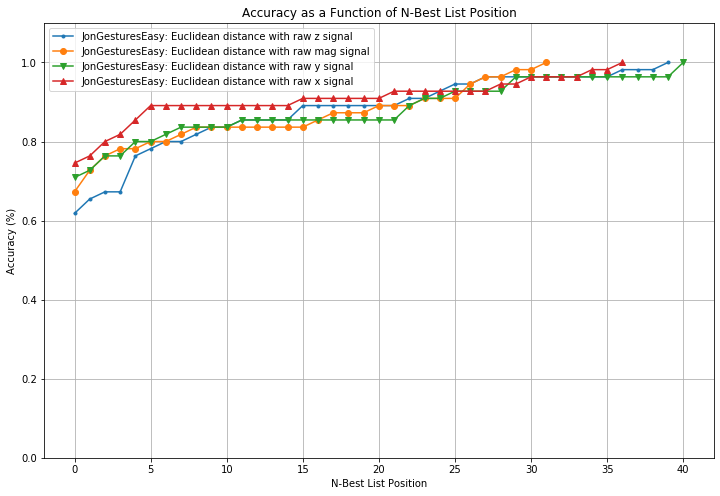
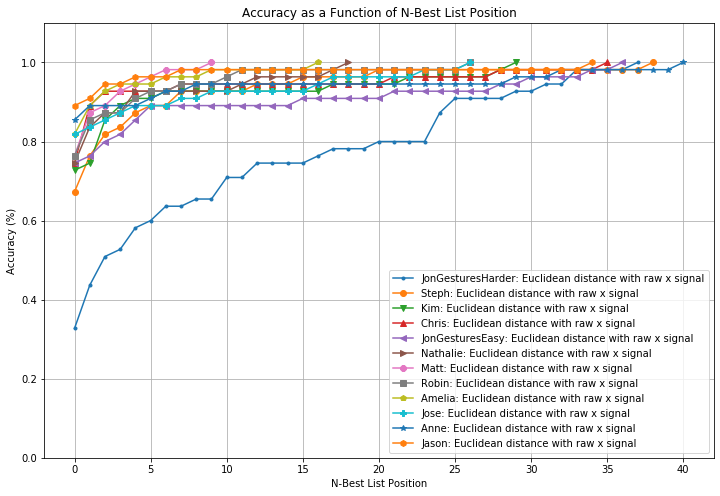
def plot_nbestlist_performance(experiments):
'''
Plots a line graph of n-best list performance
experiments : an Experiments object
'''
list_experiments = experiments.get_experiments_sorted_by_accuracy();
fig, axes = plt.subplots(1, 1, figsize=(12, 8))
marker = itertools.cycle(('.','o','v','^','<','>','8',
's','p','P','*','h','H','+','x','X','D','d','|',
'_',0,1,2,3,4,5,6,7,8,9,10,'1','2','3','4',','))
for experiment in list_experiments:
nbest_list_performance = experiment.get_nbestlist_performance()
axes.plot(nbest_list_performance, marker=next(marker), label=experiment.title)
axes.grid()
axes.legend()
axes.set_title("Accuracy as a Function of N-Best List Position")
axes.set_ylabel("Accuracy (%)")
axes.set_ylim(0, 1.1)
axes.set_xlabel("N-Best List Position")
plot_classification_result_as_confusion_matrix(results_x)
plot_bar_graph_overall_performance(experiments)
plot_bar_graph_overall_time(experiments)
plot_bar_graph_avg_time_per_comparison(experiments)
plot_nbestlist_performance(experiments)

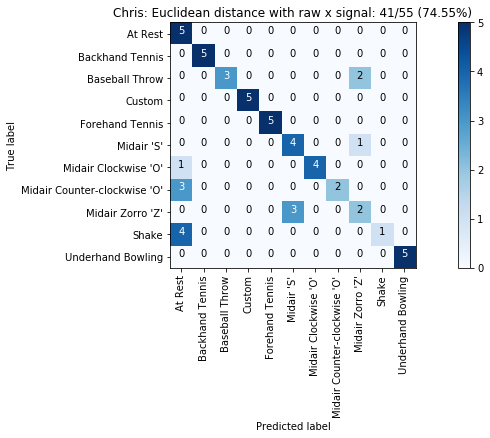
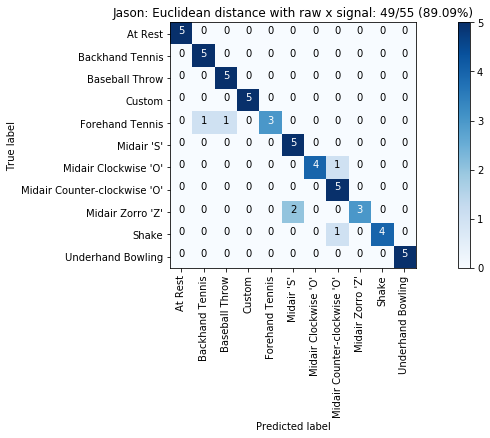
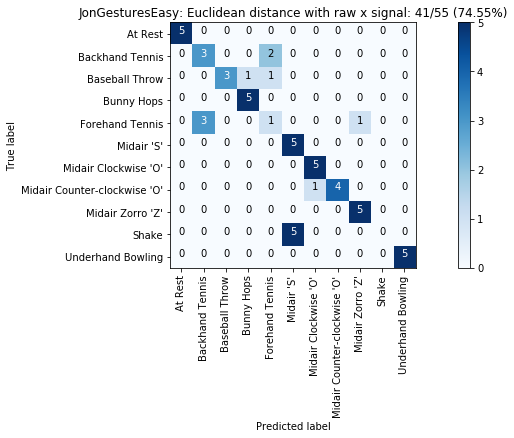
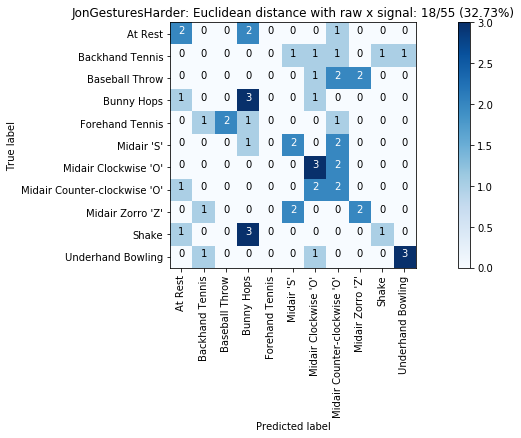
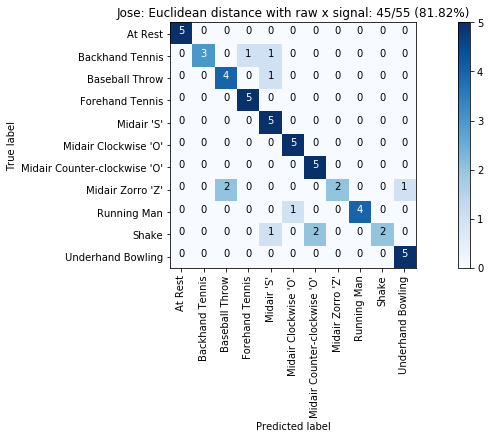
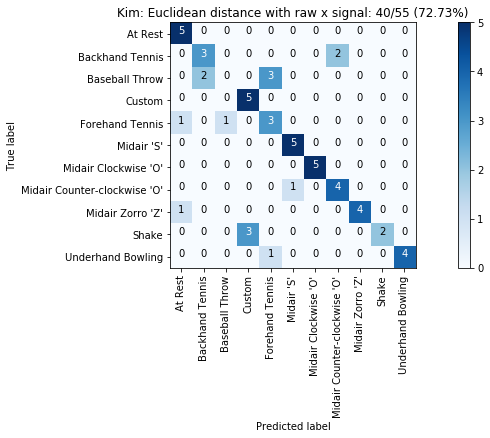
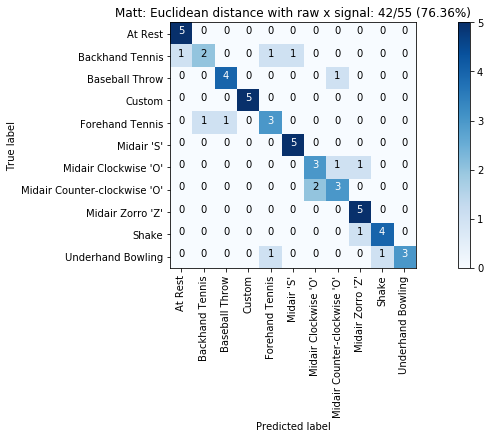
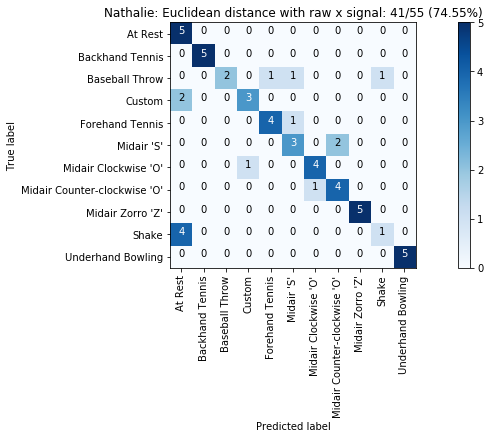
Comparing performance across gesture sets¶
# track multiple experiments
experiments = Experiments()
# Run experiments across all gesture sets
for gesture_set_name, gesture_set in map_gesture_sets.items():
list_folds = generate_kfolds_scikit(5, gesture_set, seed=5)
# run initial experiment
results = run_matching_algorithm(list_folds, find_closest_match_euclid_raw_x, verbose=False)
results.title = "{}: Euclidean distance with raw x signal".format(gesture_set.name)
results.print_result()
plot_classification_result_as_confusion_matrix(results)
experiments.add(results)
avg_accuracy, stddev = experiments.get_avg_accuracy_with_std()
print(f"Average accuracy: {avg_accuracy} Stdev={stddev}")
plot_bar_graph_overall_performance(experiments)
plot_nbestlist_performance(experiments)


avg_accuracy, stddev = experiments.get_avg_accuracy_with_std()
print(f"Average accuracy: {avg_accuracy} Stdev={stddev}")
Sandbox¶
Everything below here is a Sandbox for you to play. You could do this in another Jupyter Notebook but I often have some cells at the bottom of my notebook that let's me experiment with and play with Python and the numpy, scipy, etc. libraries. I've added some example playground cells that I used when making the assignment.
Feel free to delete all of these cells but I thought they might be informative for you.
# Demonstration of numpy arithmetic array operations
import numpy as np
x = np.array([1,2,3])
y = np.array([1,2,3])
z = np.array([1,2,3])
sum1 = np.add(x, y, z)
print(sum1)
x = np.array([1,2,3])
y = np.array([1,2,3])
z = np.array([1,2,3])
sum2 = x + y + z
print(sum2)
# playing around with numpy subtraction. In order for these operations to work
# the arrays must be of the same size
np1 = np.array([1, 2, 3, 4, 5])
np2 = np.array([1, 2, 4, 5, 5])
np2 - np1
np3 = [1, 2, 3]
# the (0,2) value tells pad to pad 0 times in the front of array
# and three times to the end of array. See: https://docs.scipy.org/doc/numpy/reference/generated/numpy.pad.html
np3_resized = np.pad(np3, (0, 2), 'constant', constant_values=0)
np3_resized - np2
# Testing to see if the numpy 'where' method supports string matching
a = np.array(['apple', 'orange', 'apple', 'banana'])
indicesWhereThereAreApples = np.where(a == 'apple')
print (indicesWhereThereAreApples)
print (a[indicesWhereThereAreApples])
# Playing around with classes in Python 3. Notice how just like in Javascript, you can add a new member variable
# just by starting to use it!
class DummyClass:
def __init__(self, variable):
self.testVar = variable
dummy = DummyClass(5)
print(dummy.testVar)
dummy.newVar = 7 # added a new member variable called newVar here. Cool!
print(dummy.newVar)
vars(dummy) # prints out the member variables of the class
# Experimenting with how unpacking tuples work
testTuple = (1,2,3,4,5,6,7,8,9,10)
print(testTuple)
print(*testTuple)
print(*testTuple[5:])
# Experimenting with how we delete things out of lists
import random
testDict = {"a":1, "c":3, "d":4}
a = list(testDict.keys())
print(a)
random.shuffle(a)
print(a)
del a[1]
print(a)
# Playing around with how we can split up and combine lists in Python
testList = [1, 2, 3, 4, 5]
index = 4
print(testList[0:index] + testList[index + 1:5])
index = 3
print(testList[0:index] + testList[index + 1:5])
print(testList[index:])
print(testList[:index])
# Find Euclidean distance between two numpy vector arrays
np1 = np.array([1, 2, 3, 4, 5])
np2 = np.array([5, 4, 3, 2, 1])
# First, we'll try numpy's way of determining Euclidean distance
# See: https://stackoverflow.com/a/1401828
npDist = np.linalg.norm(np2 - np1)
print(npDist)
# Next, we'll try scipy's way
# See: https://stackoverflow.com/a/21986532
from scipy.spatial import distance
scipyDist = distance.euclidean(np2,np1)
print(scipyDist)
# detrend playground
from scipy import signal
a = np.random.rand(50) * 50
print(a)
b = np.array(range(0,50))
c = a + b
fig, axes = plt.subplots()
# axes.plot(a)
# axes.plot(b)
axes.plot(c, label="c (avg={:0.1f})".format(np.mean(c)))
c_detrended = signal.detrend(c)
axes.plot(c_detrended, label="c_detrended (avg={:0.1f})".format(np.mean(c_detrended)))
axes.legend()
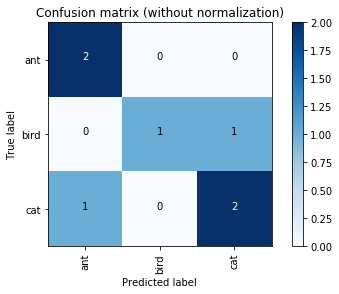
# Playing around with plotting confusion matrices
# From: http://scikit-learn.org/stable/auto_examples/model_selection/plot_confusion_matrix.html#sphx-glr-auto-examples-model-selection-plot-confusion-matrix-py
import itertools
import numpy as np
import matplotlib.pyplot as plt
from sklearn.metrics import confusion_matrix
def plot_confusion_matrix(cm, classes,
normalize=False,
title='Confusion matrix',
cmap=plt.cm.Blues):
"""
This function prints and plots the confusion matrix.
Normalization can be applied by setting `normalize=True`.
"""
if normalize:
cm = cm.astype('float') / cm.sum(axis=1)[:, np.newaxis]
print("Normalized confusion matrix")
else:
print('Confusion matrix, without normalization')
print(cm)
plt.imshow(cm, interpolation='nearest', cmap=cmap)
plt.title(title)
plt.colorbar()
tick_marks = np.arange(len(classes))
plt.xticks(tick_marks, classes, rotation=90)
plt.yticks(tick_marks, classes)
fmt = '.2f' if normalize else 'd'
thresh = cm.max() / 2.
for i, j in itertools.product(range(cm.shape[0]), range(cm.shape[1])):
plt.text(j, i, format(cm[i, j], fmt),
horizontalalignment="center",
color="white" if cm[i, j] > thresh else "black")
plt.tight_layout()
plt.ylabel('True label')
plt.xlabel('Predicted label')
y_true = ["cat", "ant", "cat", "cat", "ant", "bird", "bird"]
y_pred = ["ant", "ant", "cat", "cat", "ant", "cat", "bird"]
labels=["ant", "bird", "cat"]
cm = confusion_matrix(y_true, y_pred, labels)
plt.figure()
plot_confusion_matrix(cm, classes=labels,
title='Confusion matrix (without normalization)')
plt.figure()
plot_confusion_matrix(cm, classes=labels, normalize=True,
title='Confusion matrix (with normalization)')
plt.show()